随着工业4.0和智能制造的快速发展,智能驱动控制系统在自动化、机器人、新能源等领域中发挥着核心作用。一个可扩展的网络系统设计不仅能够提升系统的性能与可靠性,还能适应未来技术升级和业务扩展的需求。本文将探讨智能驱动控制系统的可扩展网络系统设计与开发的关键要素,包括架构设计、通信协议、安全机制以及开发策略。
### 一、系统架构设计
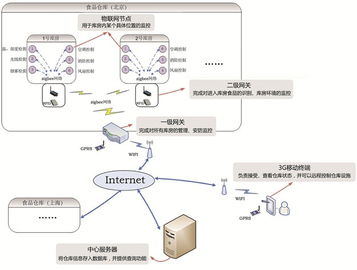
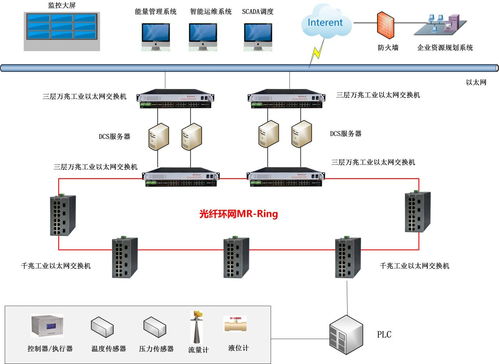
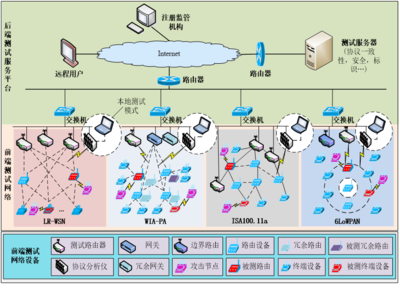
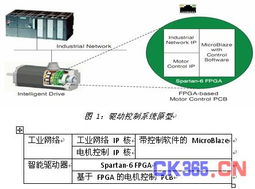
智能驱动控制系统的网络架构应采用分层模块化设计,以支持灵活扩展。典型的架构包括边缘层、控制层和云平台层。边缘层负责数据采集与实时控制,通过嵌入式设备与传感器连接;控制层处理数据融合与决策逻辑,可采用工业PC或专用控制器;云平台层实现大数据分析与远程监控。这种分层设计允许各层独立升级,并通过标准化接口实现互联,确保系统在设备增加或功能扩展时仍能保持高效运行。
### 二、通信协议与网络拓扑
为了保障系统的实时性与可靠性,通信协议的选择至关重要。推荐采用混合协议策略:在边缘层使用实时以太网协议(如EtherCAT或PROFINET)以确保低延迟控制;在控制层与云平台间采用MQTT或OPC UA协议,支持跨平台数据交换。网络拓扑应设计为星型或树型结构,结合冗余链路和负载均衡机制,防止单点故障,并允许通过添加交换机或网关轻松扩展网络规模。
### 三、安全与可扩展性机制
网络安全是智能驱动控制系统不可忽视的一环。设计时应集成多层次安全措施,包括设备身份认证、数据加密传输(如TLS/SSL)以及入侵检测系统。同时,系统应支持动态资源配置和模块化部署,例如通过容器化技术(如Docker)实现驱动控制组件的快速部署与扩展。采用微服务架构可将系统功能拆分为独立服务,便于单独升级和维护,从而提升整体可扩展性。
### 四、开发策略与最佳实践
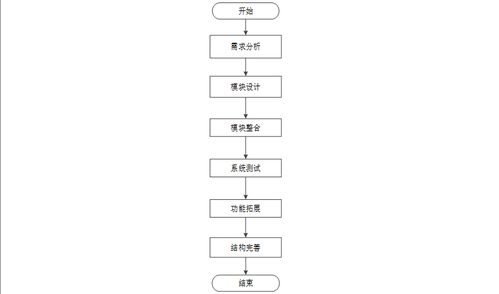
在开发过程中,建议采用敏捷开发与DevOps方法,结合持续集成/持续部署(CI/CD)流水线,以加速迭代并确保系统稳定性。开发团队应优先考虑标准化和开源工具,例如使用ROS(机器人操作系统)框架进行驱动控制逻辑开发,或利用Kubernetes管理容器化服务。同时,实施全面的测试策略,包括单元测试、集成测试和性能测试,以验证系统在扩展后的可靠性与效率。
### 五、未来展望
随着5G、人工智能和边缘计算技术的成熟,智能驱动控制系统的网络设计将更加智能化和自适应。未来可探索基于AI的动态资源调度和预测性维护功能,进一步提升系统的可扩展性与智能化水平。通过持续优化架构与协议,智能驱动控制系统将更好地服务于工业自动化、智能交通等新兴领域。
智能驱动控制系统的可扩展网络系统设计需要兼顾架构灵活性、通信效率、安全保障与开发效率。通过模块化、标准化和前瞻性策略,企业能够构建一个适应未来需求的强大系统,推动智能制造与数字化转型的深入发展。